Medical Robotics
Purpose: As Artificial Intelligence (AI) becomes more capable, the amount of work requiring high-degrees of intelligence will become competitive and may gradually narrow. Even as a Ph.D. student who works in AI, I expect my utility may wane depending on my skillset. I see value in understanding how to interface physical platforms with artificially intelligent systems, which is likely to remain a required skillset in the coming decades. That the motivation of this project is to become familiar with hardware, and ultimately connect large language models like ChatGPT to direct to the movement of medical robots.
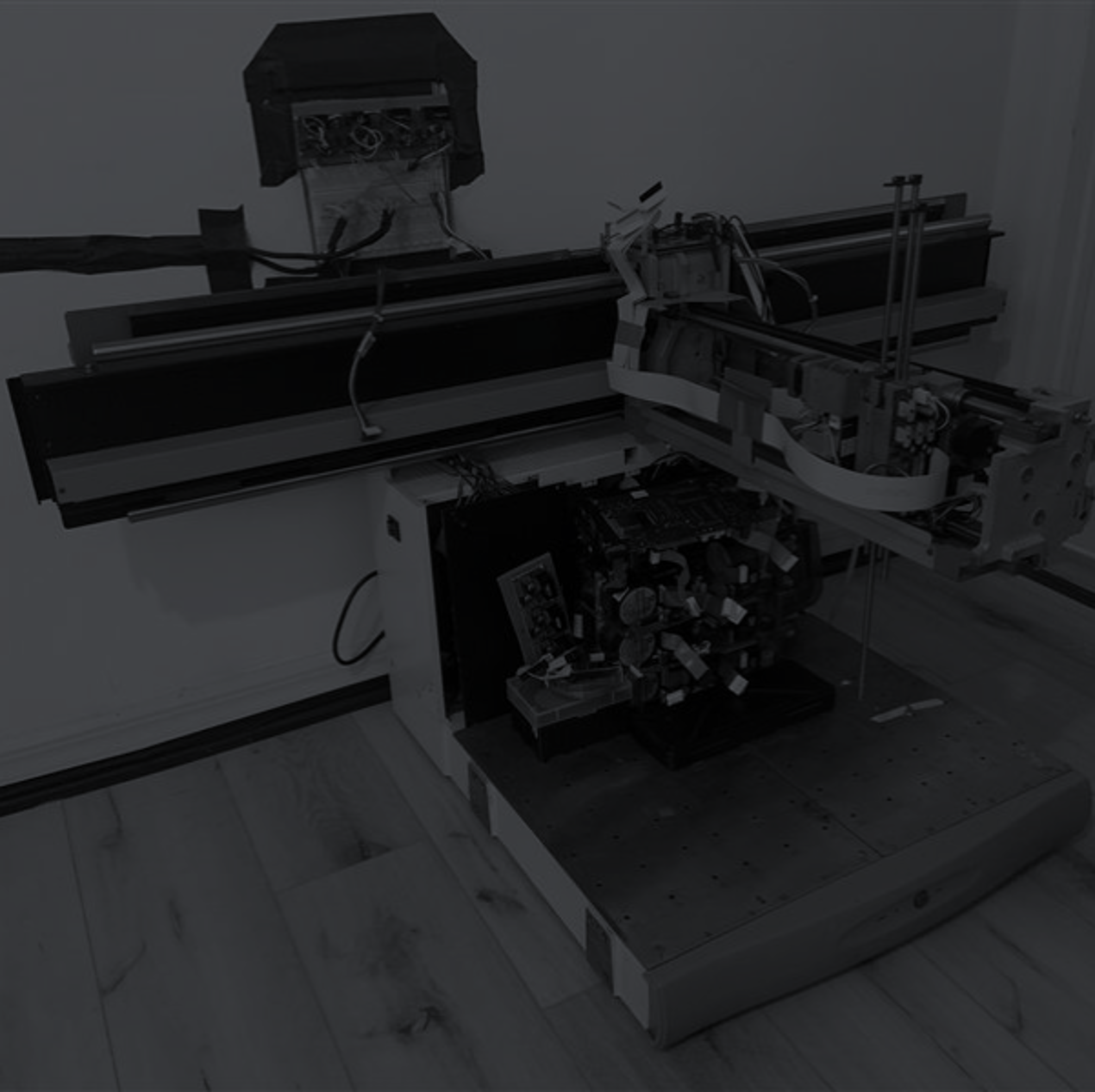
Background: So I bought this robot (Figure 1) for $25 from an auction site provided by the University of Florida. Originally designed to perform pipetting for politics experiments, Product device provided a valuable test platform to learn the basics of stepper motor control, sensor feedback, and the design of software to control locomotion. This page overviews the design of an of an electrical switch which can take stepper motor control signals, and electronically specify which of four stepper motors is currently running.
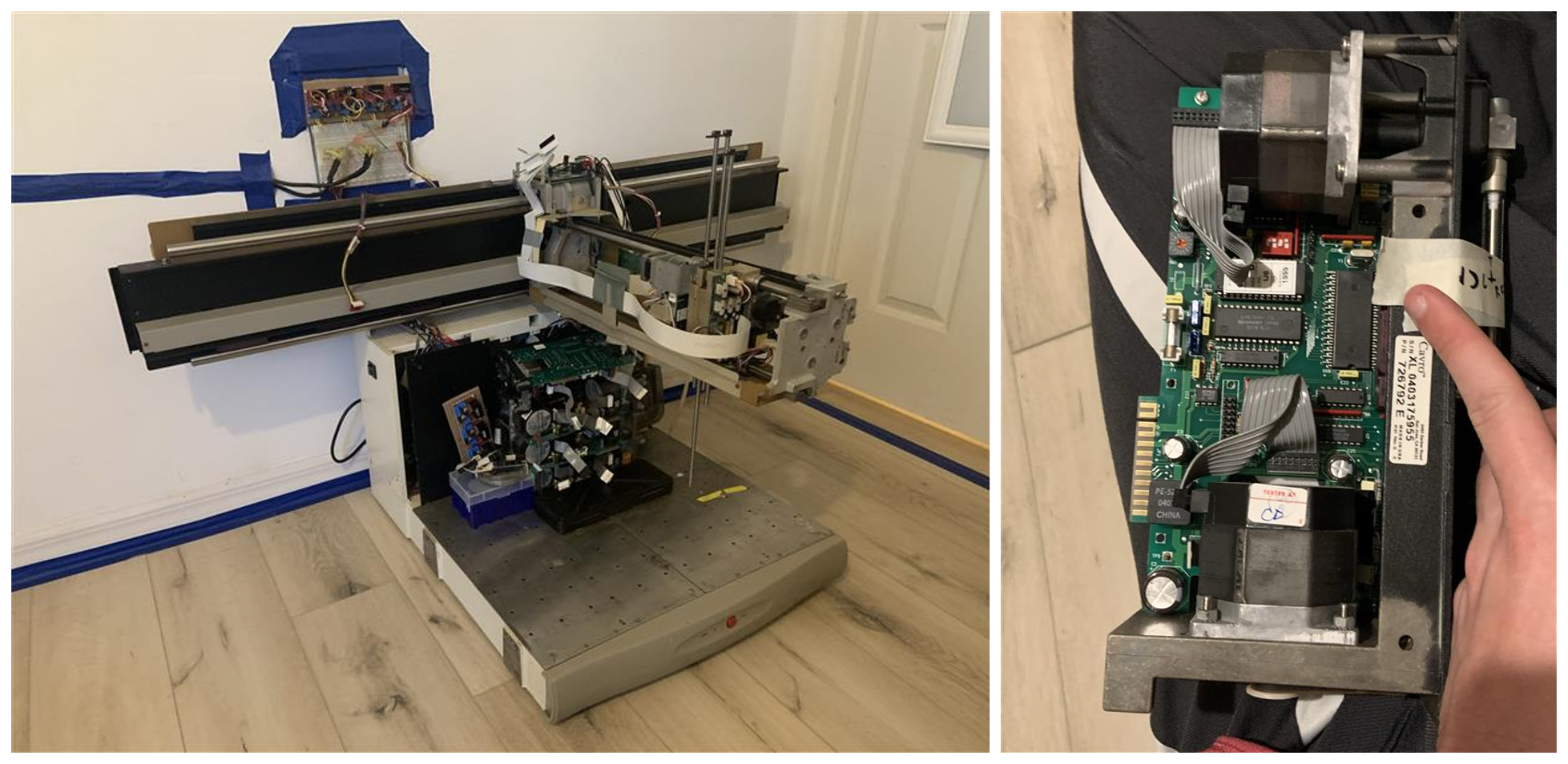
Figure 1. Medical robot and stepper-motor control unit, originally designed to automate pipetting and expedite experiments in biotechnology
The first stage of this project was to control the stepper motors, using stepper motor control drivers, and a switchboard which uses a multiplexer to activate of four stepper motors. A video of this working prototype is seen in the following video.
One of the main limitations with this device is that it could only control a single stepper motor at a time. Furthermore, and as seen in the video, this interface is controlled manually. In order to improve these functions, a second version of the design allows 2 motors to run simultaneously and uses an Arduino to specify which of these two servers are running. This makes it possible to use the serial monitor tool from Arduino to specify the active stepper motors. An overview of the changes are seen in Figure 2, which, if I might add, makes the design look significantly more attractive.
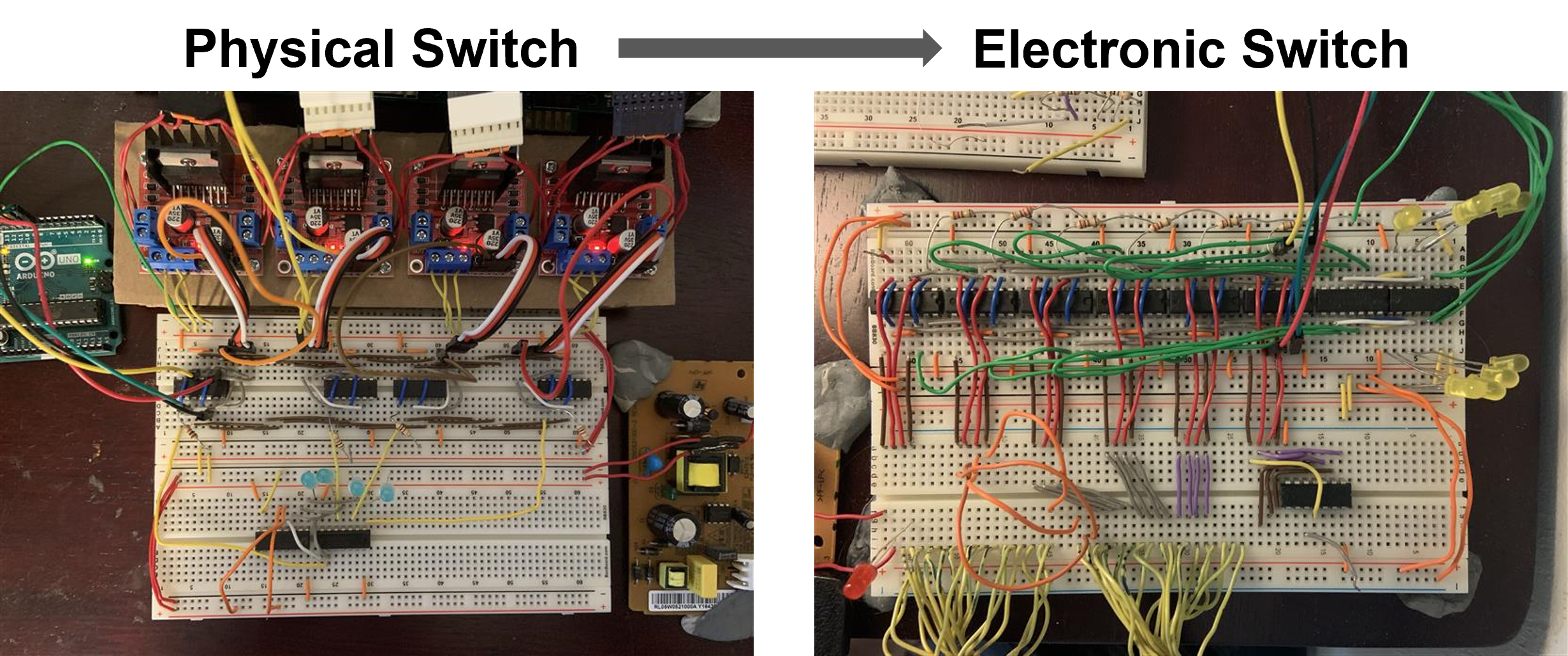
Figure 2. Medical robot and stepper-motor control unit, originally designed to automate pipetting and expedite experiments in biotechnology
In the future, I'm hoping to incorporate sensor feedback from the medical robot, control the stepper motors driving the gantry system, design control software on the PC, and allow language model to call the control software. Quite exciting! Looking forward to getting everything up and running.